


Expert en Étude et conception mécanique.




















Présentation de la recherche à la société TechSYS
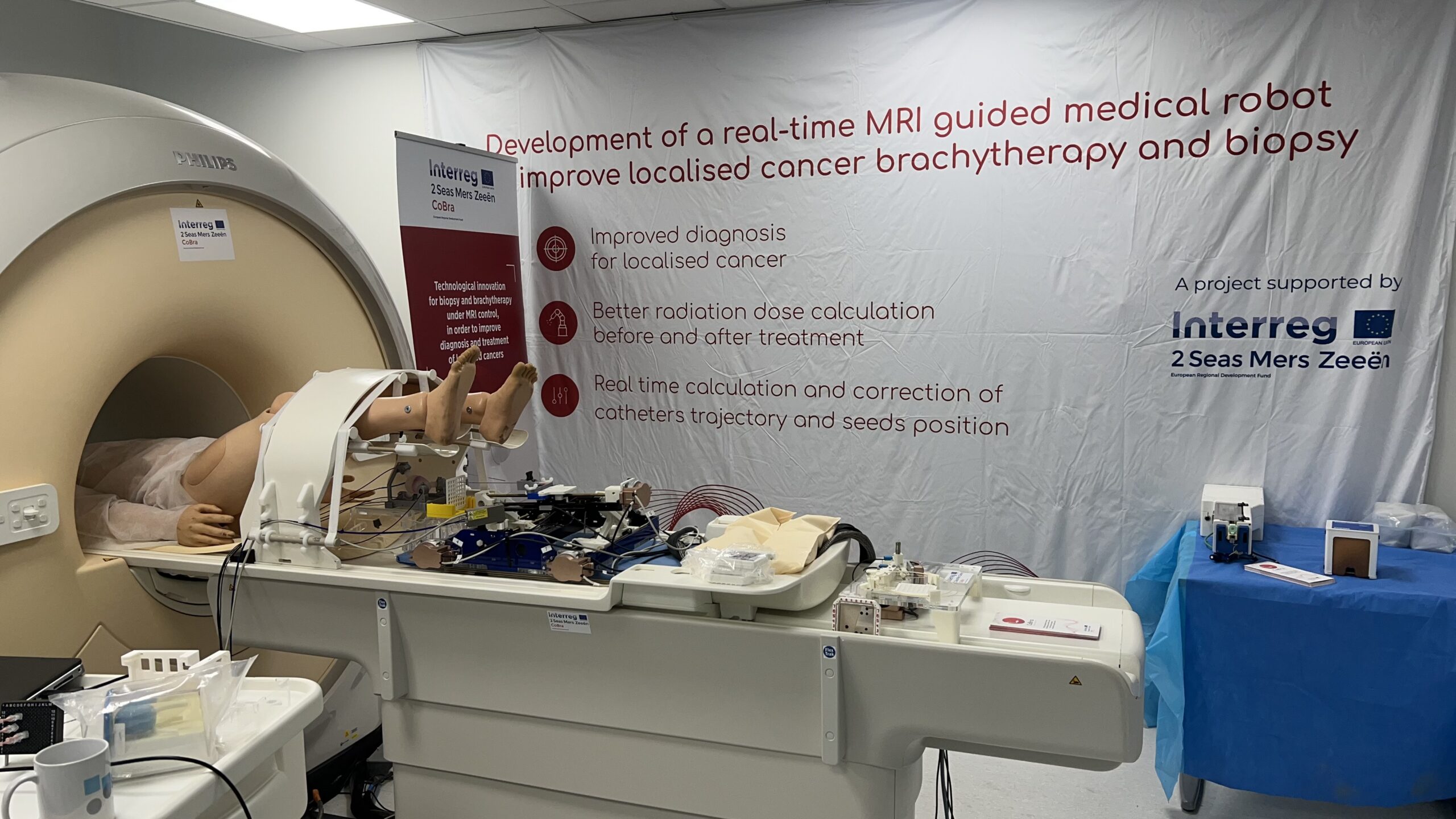
Démos sur PRETIL - Présentation de la recherche à la société TechSYS Dans le cadre de ses actions de valorisation et de collaboration, la plateforme de robotique PRETIL, intégrée au laboratoire CRIStAL et située dans le bâtiment ESPRIT, a organisé une visite à destination de la société TechSYS. Cette rencontre avait pour objectif de faire découvrir les activités de la plateforme, ses équipements, ainsi que les projets de recherche et d’innovation en robotique menés au sein du laboratoire.


